Tabatha


Viso
Hey! I’m Tabatha Viso (she/her), a robotics researcher, developer, and engineer. My focus areas are:

Swarm Intelligence & Collaborative Behavior
Multi-Objective Task Planning
Heterogeneous Robot Teams — land, air, & water
Human-in-the-Loop Automation
Developing for Real-World Implementation
Safety-Critical Solutions & Ethical Engineering
active research


Novel multi-agent UAV path planning algorithm for
urgent navigation in unknown environments
Research team: T. Viso, S. Tseng, M. Weissman
Mentor: C.-K. Ngan
Affiliation: Dept. of Robotics Engineering, WPI
Applied domain: Last-mile delivery
Objective: To develop a reliable and efficient swarm path planning algorithm for UAVs to navigate complex scenarios with varying swarm sizes and unknown environments of different sizes
Project context: Expanding on previous work studying three algorithms, we aim to develop one unified algorithm addressing all studied scenarios.
Key challenges: Enhancing computational efficiency and robustness, mitigating convergence risk to local minima
Anticipated completion: September 2024
Collaborative multi-objective task planning for
heterogenous multi-agent robot team
Research team: T. Viso, S. Tseng, M. Weissman
Mentor: C.-K. Ngan
Affiliation: Dept. of Robotics Engineering, WPI
Applied domain: Automated agriculture
Objective: To develop a coordinated system for a diverse group of robots to perform multiple agricultural tasks efficiently, addressing the need for enhanced productivity and resource management in farming
Key challenges: Optimizing task allocation for varying robot agent capabilities, enabling inter-agent collaboration and resource-sharing, managing computational efficiency and robustness
Anticipated completion: October 2024
selected work
Comparison & recommendation of state-of-the-art multi-agent UAV path planning algorithms for deliveries in unknown environments (2023-2024)
Multi-objective global task planning algorithm
using Pareto dominance for UAV swarm in urban fire
search & rescue application (2023)

Rail network & vehicle performance simulation modeling, analysis, & recommendations (since 2022)
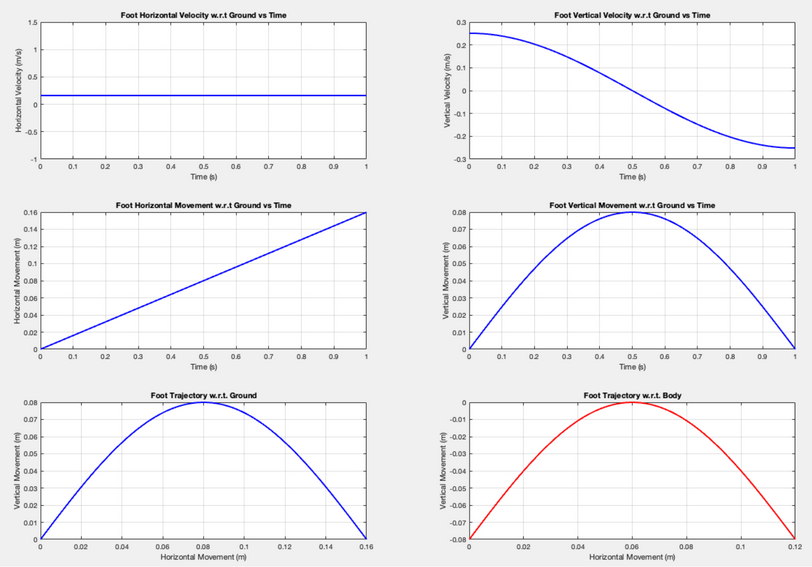
Simulation & analysis of legged octopod & hexapod gaits on varying terrains on- & off-planet (2022)

Guidance, navigation, & controls for unmanned marine surface research vessel (2021)
Acoustic engineering modeling, analysis, & recommendations. AV design (2020-2021)
recent publication
“Swarm Intelligence Path-Planning Pipeline and Algorithms for UAVs”
Coauthors: T. Viso, S. Tseng, M. Weissman, W. Harris, C.-K. Ngan
Presented at: 26th International Conference on Enterprise Information Systems (ICEIS), 2024
Published in: Proceedings of the 26th ICEIS Volume 1, pages 747-758, available here & here
Presented by: Tabatha Viso — April 29, 2024
Abstract: This research supports domain experts in selecting appropriate path planning algorithms for UAVs to address business problems, such as last-mile delivery. The study provides in-depth analysis and recommendations for three promising approaches: reinforcement learning-based, bio-inspired, and physics-based algorithms.
These methods are evaluated for solving the multi-agent UAV path planning problem.
Key Contributions:
- Developed a 2D UAV path planning simulation environment in Python
- Simulated three state-of-the-art optimization algorithms
- Conducted 450 simulations of 9 variations of swarm sizes and environment complexities
- Compared algorithm performance using classical A* Search as a baseline
- Provided informed recommendations for optimal use cases of each approach, considering environmental complexity and delivery urgency
education

M.S. Robotics Engineering
Worcester Polytechnic Institute
December 2023
B.S. Mechanical Engineering
University of Hawaiʻi at Mānoa
December 2021
Mechatronic Systems Eng.
Hochschule Rhein-Waal
From 2015 to 2019 (transferred)
High School Diploma
Deerfield Academy
May 2014

life & leisure



tabatha.viso@gmail.com